






No mundo fascinante da indústria automotiva, poucos sistemas são tão fundamentais quanto o CANbus. Essa tecnologia revolucionária é o elo invisível que permite a comunicação eficiente entre os diversos módulos eletrônicos de um veículo do motor aos sistemas de segurança, passando por itens como faróis, janelas e assistências à condução. Mas afinal, o que é o CANbus e por que ele é tão importante?
Neste artigo, vamos descomplicar o funcionamento desse protocolo, explicar como ele garante a harmonia entre os sistemas e mostrar por que o CANbus é indispensável para a segurança, a performance e a inteligência dos veículos modernos. Seja você um entusiasta da mecânica ou apenas curioso sobre as inovações tecnológicas que movem os carros atuais, prepare-se para entender como essa rede silenciosa transformou a maneira como dirigimos e interagimos com nossos automóveis.
O que é o CANbus?

imagens de vários produtos canbus da Permak
O CANbus (abreviação de Controller Area Network bus, ou “barramento de rede de área do controlador”) é um padrão de comunicação serial desenvolvido para facilitar a interconexão de microcontroladores e dispositivos sem a necessidade de um computador host
Sendo assim o CANbus foi criado para reduzir a quantidade de fios e simplificar a arquitetura elétrica dos veículos.
Originalmente projetado pela Bosch na década de 1980, o CANbus rapidamente se tornou o padrão na indústria automotiva devido à sua eficiência. Ele permite que diferentes componentes eletrônicos de um veículo se comuniquem entre si de maneira rápida e confiável, essencial para o funcionamento harmonioso de sistemas complexos.
A principal característica que diferencia o CANbus de outros sistemas de comunicação é sua capacidade de operar em um ambiente ruidoso, como o encontrado em veículos. Ele usa uma técnica de comunicação baseada em mensagens, onde cada mensagem possui uma identificação única, garantindo que os dados sejam transmitidos de forma eficaz e sem interferências. Essa abordagem permite que múltiplos módulos compartilhem informações em tempo real, vital para o desempenho e segurança do veículo.
Além disso, o CANbus é conhecido por sua alta taxa de transferência de dados, que pode chegar a até 1 Mbps. Isso é particularmente importante em aplicações automotivas, onde a velocidade de comunicação pode influenciar diretamente a resposta do veículo a comandos do motorista e a eventos externos. Assim, o CANbus não só melhora a eficiência dos sistemas eletrônicos, mas também contribui para uma experiência de condução mais segura e agradável.
A história do CANbus na indústria automotiva
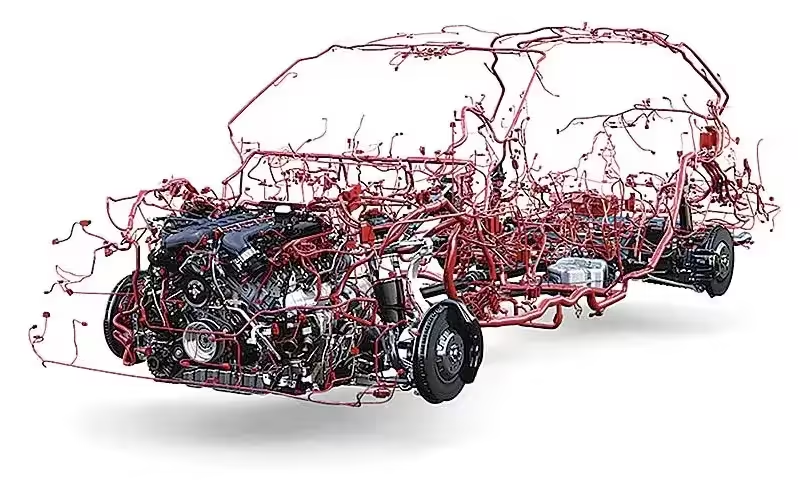
Antes do barramento CAN existir, os carros eram verdadeiras teias de fios. Cada componente elétrico precisava de sua própria conexão direta com interruptores e fontes de energia. O resultado era um sistema pesado, complexo e pouco eficiente, especialmente quando os veículos começaram a incluir cada vez mais funções eletrônicas. Nos anos 1960, por exemplo, um carro podia ter milhares de fios pesados correndo por sua estrutura. Isso aumentava o custo, dificultava a montagem e comprometia a eficiência do veículo, principalmente no cenário pós-crise do petróleo, onde cada quilo economizado fazia diferença.
A ideia do Controller Area Network (CANbus) surgiu em 1983, quando a Bosch iniciou o desenvolvimento de um protocolo de comunicação serial específico para veículos. O objetivo era permitir a troca eficiente de dados entre os diversos módulos eletrônicos dos automóveis, reduzindo a complexidade e o custo das fiações tradicionais. A Mercedes-Benz e a Intel se envolveram no projeto pouco tempo depois, contribuindo com sua expertise e recursos para a evolução do protocolo. O CANbus foi oficialmente apresentado pela Bosch em fevereiro de 1986, durante o congresso da Society of Automotive Engineers (SAE) em Detroit, Michigan .
Embora o sistema CANbus não tenha eliminado completamente a necessidade de cabeamento nos veículos, ele representou uma revolução ao conter a proliferação de fios e viabilizar a interligação inteligente entre diferentes módulos eletrônicos.
Já em 1987, a Intel lançou os primeiros chips controladores CAN, seguidos pela Philips. E, em 1991, o Mercedes-Benz Classe S W140 se tornou o primeiro carro de produção a utilizar um sistema de comunicação baseado no CANbus.
O sucesso foi rápido. O sistema se mostrou confiável, robusto, leve e eficiente. Em 1993, a tecnologia foi reconhecida como padrão internacional com a publicação da norma ISO 11898, que se tornou a base para a padronização da comunicação entre módulos eletrônicos em veículos ao redor do mundo.
A especificação original, conhecida como CAN 2.0, foi dividida em duas versões:
- CAN 2.0A: formato com identificador de 11 bits;
- CAN 2.0B: formato estendido com identificador de 29 bits.
Mais tarde, a ISO 11898 também foi dividida:
- ISO 11898-1: camada de enlace de dados;
- ISO 11898-2: camada física para CAN de alta velocidade;
- ISO 11898-3: camada física para CAN de baixa velocidade e tolerante a falhas.
Em 2012, surgiu o CAN FD (Flexible Data Rate), uma evolução do protocolo tradicional. Ele permitiu o envio de dados em maior volume e em velocidades mais altas, mantendo a compatibilidade com redes CAN existentes. Essa versão foi especialmente importante para acompanhar a crescente demanda por dados em sistemas automotivos modernos, como ADAS e conectividade veicular.
Desde sua criação, o barramento CAN evoluiu de uma simples proposta para reduzir fios para um dos pilares da eletrônica moderna. Sua história é a base do futuro dos veículos conectados, inteligentes e seguros.
Como funciona o CANbus?
Para entender o funcionamento do CANbus, pense nele como uma rede de comunicação inteligente que conecta diversos módulos eletrônicos dentro do carro, aonde todos falando a mesma língua, de forma organizada e sem confusão.
uma imagem ilustrando como funciona o canbus
Diferente de sistemas tradicionais, onde existe um “chefe” que controla a conversa, o CANbus é uma rede descentralizada. Todos os dispositivos (chamados de nós CAN) têm igual capacidade de transmitir e receber informações, sem depender de um computador central.
Mas antes de entender como a troca de mensagens acontece, vale conhecer os principais elementos que fazem tudo funcionar:
Componentes principais do sistema CANbus:
- Nós (ECUs): São os módulos do veículo que enviam e recebem informações, como por exemplo o sensor de velocidade, o controle do motor, o painel de instrumentos, etc.
- Barramento (bus): É o caminho físico que conecta todos os nós. Normalmente, é feito com dois fios trançados, que garantem resistência à interferência elétrica.
- Mensagens (frames): São pacotes de dados que viajam pela rede. Todos os nós recebem as mensagens, mas só os que se interessam por aquele tipo de informação respondem.
Com esses elementos em mente, agora sim, dá para entender os cinco mecanismos principais que garantem uma comunicação eficiente e confiável no CANbus:
- Envio da mensagem: Quando um nó precisa se comunicar, ele monta uma mensagem com um identificador (ID) e dados.
- Arbitragem: Se dois nós tentam falar ao mesmo tempo, vence quem tem a mensagem mais prioritária (menor número de ID). Isso garante que os sistemas mais críticos, como freios, tenham prioridade.
- Recebimento: Todos os módulos recebem a mensagem. Cada um analisa o identificador para saber se deve ou não processar o conteúdo.
- Verificação de erros: Antes da mensagem ser aceita, o sistema verifica se ela está íntegra. Isso é feito com mecanismos como CRC, bits de confirmação e sequência de verificação de quadros (FCS).
- Confinamento de falhas: Se algum módulo estiver com problemas, ele entra em um modo chamado “erro passivo”, onde deixa de transmitir até se recuperar, isso evita que ele prejudique a comunicação geral.
Todos os nós da rede CAN são interligados por cabos de par trançado ou fibra óptica. Cada nó possui seu próprio microcontrolador que interpreta e responde às mensagens recebidas.
Por que preciso de um CANbus?
O CANbus é o que permite que seu painel acenda quando você gira a chave, que a luz de freio responda com precisão, e que os sensores se comuniquem entre si em tempo real. Isso acontece porque todos os módulos do carro estão conectados por um mesmo “caminho de conversa”.
Além disso, ele tornou os diagnósticos automotivos muito mais fáceis. Hoje, basta um scanner em um único ponto do veículo para acessar praticamente todas as informações eletrônicas. Em vez de procurar fio por fio, o mecânico já sabe exatamente onde está o problema, assim economizando tempo, dinheiro e dores de cabeça.
Principais Vantagens do Barramento CAN
| Vantagem | O que isso significa na prática |
|---|---|
| Redução de fios e peso | Menos fiação espalhada pelo carro significa veículos mais leves, econômicos e fáceis de montar. |
| Comunicação descentralizada | Todos os módulos podem se comunicar diretamente, sem depender de um sistema central. |
| Diagnóstico facilitado | Um único ponto de acesso (como a porta OBD2) permite detectar e resolver falhas rapidamente. |
| Alta confiabilidade | O sistema tem verificação de erros e isolamento de falhas, evitando travamentos e erros em cascata. |
| Prioridade de mensagens | Mensagens críticas, como freio ou motor, têm prioridade para evitar atrasos perigosos. |
| Compatibilidade universal | Usado por praticamente todas as montadoras e padronizado globalmente (ISO 11898). |
| Tolerância a interferências | Resistente a ruídos elétricos, ideal para ambientes complexos como o cofre do motor. |
| Dados estratégicos para fabricantes | Permite coleta e análise de dados para melhorar consumo, desempenho e prever falhas. |
Tipos de CANbus
O barramento CAN evoluiu com o tempo para atender diferentes exigências dentro dos veículos modernos. Hoje, existem três variações principais: o CAN de baixa velocidade, o CAN de alta velocidade e o CAN FD. Cada uma dessas versões tem suas particularidades, pensadas para aplicações distintas, equilibrando custo, confiabilidade e desempenho.
- CAN de baixa velocidade
O CAN de baixa velocidade, também conhecido como tolerante a falhas, é ideal para funções que não exigem respostas imediatas, mas que não podem simplesmente parar de funcionar. Ele é utilizado em sistemas como controle dos vidros, travamento das portas, ajustes de bancos e iluminação interna.
Sua velocidade é limitada a 125 kbps, mas sua principal vantagem está na capacidade de continuar operando mesmo quando há uma falha em um dos fios do barramento. Essa tolerância a falhas garante que funções básicas do veículo permaneçam ativas mesmo diante de problemas na rede elétrica. Além disso, como utiliza uma fiação mais simples, esse tipo de rede costuma ser mais econômica e leve.
- CAN de alta velocidade
O CAN de alta velocidade, por sua vez, é voltado para os sistemas mais críticos do carro. Ele opera a até 1 Mbps e é utilizado em aplicações que exigem comunicação rápida e segura, como freios ABS, controle de estabilidade, airbags, direção elétrica e gerenciamento do motor.
Nesse tipo de rede, a velocidade é essencial para garantir que comandos importantes sejam executados em tempo real, contribuindo diretamente para a segurança do veículo. Apesar de não ter a mesma tolerância a falhas do CAN de baixa velocidade, sua capacidade de resposta faz dele o padrão ideal para sistemas que não podem sofrer atrasos.
- CAN FD
Por fim, há o CAN FD, uma evolução do protocolo lançada pela Bosch em 2012. FD significa “Flexible Data-rate”, e como o nome sugere, essa versão trouxe maior flexibilidade para lidar com o volume crescente de dados nos veículos atuais.
O CAN FD permite taxas de transmissão que podem ultrapassar os 5 Mbps, e seu grande diferencial é a capacidade de carregar até 64 bytes por mensagem, um salto significativo em relação aos 8 bytes do CAN tradicional. Isso o torna ideal para veículos com sistemas mais complexos, como câmeras, sensores avançados, centrais multimídia de alta integração e recursos de assistência à condução. Além disso, ele é compatível com as redes CAN já existentes, o que facilita a transição e adoção por parte das montadoras.
CANbus e instalação de acessórios
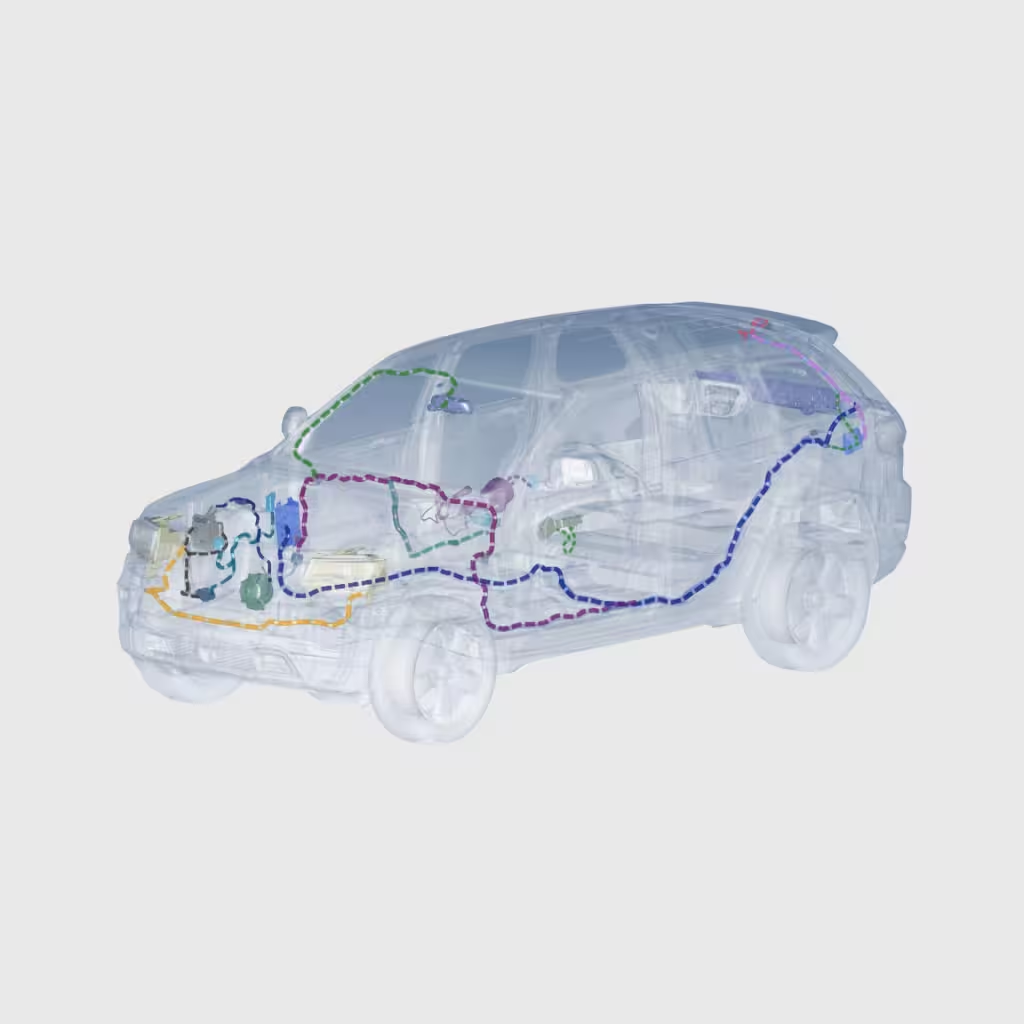
Ao instalar uma central multimídia, adicionar sensores de estacionamento ou câmeras de ré, é essencial verificar se os acessórios são compatíveis com a rede CANbus do veículo. Essa compatibilidade garante que a comunicação entre os módulos eletrônicos continue funcionando corretamente após a instalação.
Se o acessório não for compatível com o sistema CAN, o carro pode apresentar uma série de problemas. É comum, por exemplo, que funções originais deixem de funcionar, como os comandos no volante, a exibição correta das informações no painel ou a resposta automática de sensores. Além disso, podem surgir mensagens de erro, luzes acesas no painel e falhas em sistemas que antes estavam funcionando normalmente.
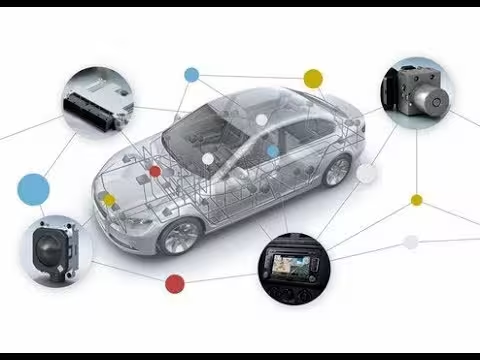
imagem do sistema can com aparelhos compativeis
Por isso, antes de qualquer modificação, é fundamental perguntar se o acessório escolhido reconhece e interpreta os sinais da rede CAN. Isso evita dores de cabeça, garante a preservação das funcionalidades originais do veículo e mantém a segurança da instalação.
Aplicações práticas do CANbus no carro
O CANbus é responsável por integrar praticamente todos os sistemas eletrônicos modernos em um veículo. Ele permite que diferentes módulos troquem informações em tempo real, mantendo a harmonia entre desempenho, conforto e segurança.
Entre os sistemas que mais se beneficiam dessa rede de comunicação estão:
Sistemas ADAS (Sistemas Avançados de Assistência ao Condutor)
Sistemas ADAS
O ADAS é um conjunto de tecnologias voltadas para a prevenção de acidentes e apoio ao motorista. Funções como alerta de colisão, assistente de permanência em faixa, frenagem autônoma de emergência, piloto automático adaptativo e sensores de ponto cego só funcionam porque há comunicação constante entre sensores (como radares, câmeras e ultrassons) e os módulos que controlam freios, direção e motor.
Sem o CAN, esses sistemas não teriam a velocidade nem a precisão necessárias para reagir a uma situação de risco em milésimos de segundo. Por exemplo: ao identificar um pedestre atravessando repentinamente, a câmera envia um sinal via CANbus para o módulo de freio, que aciona automaticamente a frenagem de emergência, tudo em frações de segundo.
ABS (Sistema de Freios Antibloqueio)
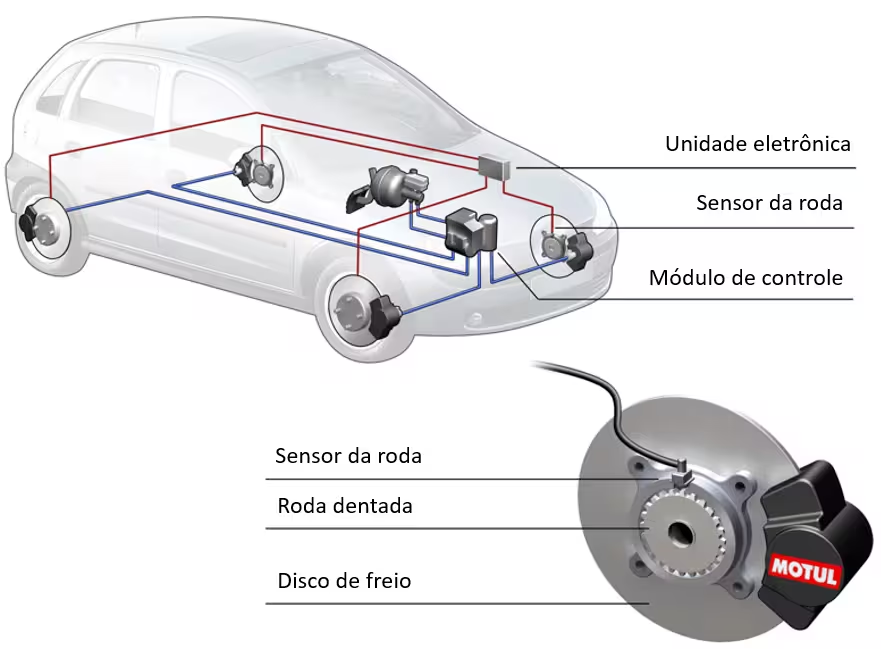
Sistema ABS
O ABS impede que as rodas travem durante uma frenagem brusca. Para isso, sensores monitoram a rotação de cada roda em tempo real e enviam essas informações para a ECU de freio. Através do barramento CAN, o módulo interpreta os dados e ajusta a pressão do freio individualmente em cada roda, garantindo que o carro desacelere com controle mesmo em situações extremas.
ESC (Controle Eletrônico de Estabilidade)
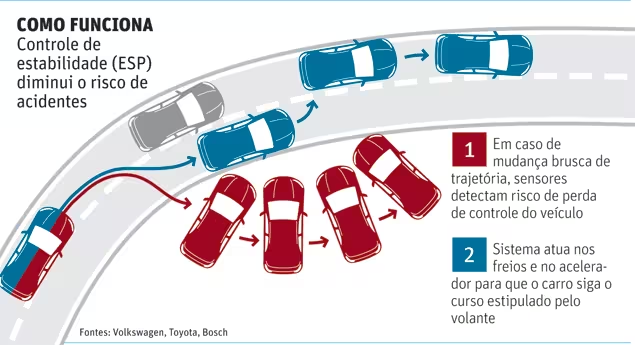
Sistema ESC
O ESC é um sistema que atua quando o carro começa a perder tração ou estabilidade em curvas ou pistas escorregadias. Ele detecta desvios no comportamento do veículo e envia comandos, via CAN, para corrigir a trajetória, acionando automaticamente os freios nas rodas certas e reduzindo a potência do motor, se necessário.
Esse tipo de ação precisa ser extremamente rápida e coordenada, e só é possível graças à eficiência do CANbus em gerenciar múltiplas mensagens com prioridades diferentes e latência mínima.
Conclusão
O barramento CAN revolucionou a forma como os veículos se comunicam internamente. Deixando para trás a complexidade dos sistemas antigos e trazendo mais eficiência, segurança e inteligência para os carros modernos.
Conhecer seu funcionamento, aplicações e cuidados na hora de instalar novos acessórios é essencial para quem quer preservar as funções originais do veículo e evitar falhas indesejadas.
Se você chegou até aqui, já está um passo à frente na hora de entender e respeitar a eletrônica do seu carro.
CANbus: A Espinha Dorsal da Eletrônica Automotiva Moderna
Introdução ao CANbus
Com o avanço da tecnologia embarcada, os veículos modernos tornaram-se verdadeiras redes sobre rodas. No coração dessa transformação encontra-se o protocolo CANbus (Controller Area Network), que permite que diferentes sistemas eletrônicos se comuniquem de forma eficiente, coordenada e em tempo real.
Desenvolvido para substituir complexas malhas de fios, o CANbus tornou-se fundamental para a operação de automóveis, caminhões, máquinas agrícolas e até motocicletas. Ele não apenas reduz custos e falhas, como também permite a integração entre diferentes módulos eletrônicos, algo indispensável em funções como controle de tração, freios ABS, airbag, e direção autônoma.
A Origem e Evolução do CANbus
O CANbus foi desenvolvido pela Bosch em 1983 com um propósito claro: simplificar a comunicação entre unidades de controle eletrônicas (ECUs) dentro dos veículos. À medida que os automóveis incorporavam mais recursos eletrônicos — como vidros elétricos, sensores de estacionamento e módulos de transmissão — a quantidade de fios crescia exponencialmente, tornando o sistema caro, pesado e propenso a falhas.
A solução veio com o CAN, que passou a utilizar uma rede digital compartilhada, onde cada unidade pode enviar e receber mensagens de forma padronizada. Isso não apenas reduziu a fiação, como também melhorou a velocidade de resposta e a confiabilidade dos sistemas.
Com o tempo, o protocolo evoluiu e ganhou versões mais robustas, como o CAN FD (Flexible Data-rate), para atender às demandas de dados mais complexas dos veículos modernos.
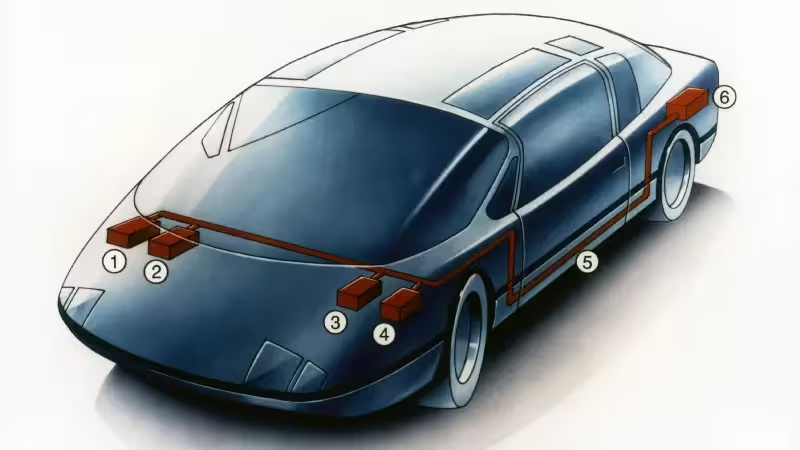
A Arquitetura Tradicional vs. Arquitetura CAN
Antes do surgimento do CANbus, os veículos utilizavam uma arquitetura ponto a ponto, onde cada dispositivo eletrônico precisava estar conectado diretamente ao módulo de controle central. Isso gerava uma verdadeira “teia” de cabos — com altos custos de produção, dificuldades de manutenção e maior risco de interferência e falhas.
Com a introdução do CANbus, essa lógica foi transformada. Agora, todas as ECUs podem se conectar a um barramento comum de comunicação. As mensagens são enviadas com identificadores específicos e cada módulo “escuta” apenas o que lhe interessa.
Essa abordagem reduz significativamente o número de fios, permite manutenção mais simples e oferece uma estrutura escalável, pronta para suportar tecnologias ainda mais avançadas, como a condução autônoma e os veículos elétricos conectados.
Como Funciona a Rede CAN
O funcionamento do CANbus baseia-se em uma lógica de comunicação por mensagens, onde todos os módulos eletrônicos compartilham uma mesma linha de transmissão. Cada mensagem enviada possui um identificador único, que indica sua prioridade e conteúdo.
Ao contrário do modelo tradicional mestre-escravo, o protocolo CAN adota uma abordagem multimestre, o que significa que qualquer unidade de controle (ECU) pode iniciar a comunicação a qualquer momento. Quando duas mensagens são enviadas simultaneamente, o sistema realiza uma arbitragem não destrutiva, priorizando a mensagem com maior importância — geralmente aquela com o menor valor de ID.
Além disso, cada ECU “ouve” todas as mensagens transmitidas, mas apenas processa aquelas cujo identificador corresponde ao que ela está programada para interpretar. Isso garante uma distribuição eficiente e seletiva dos dados.
Benefícios da Comunicação Integrada
O maior diferencial do protocolo CAN está na capacidade de permitir uma comunicação integrada, rápida e confiável entre diversos sistemas do veículo. Isso elimina redundâncias, sincroniza respostas e garante segurança operacional.
Por exemplo, ao acionar o freio, o módulo de freios envia um sinal pelo CANbus. Esse sinal pode ser simultaneamente interpretado por:
- O módulo da transmissão (para reduzir a marcha);
- O sistema de controle de tração (para equilibrar forças);
- O sistema de iluminação (para acionar a luz de freio);
- O módulo de airbag (para preparar o sistema caso ocorra colisão).
Essa resposta coordenada e em tempo real só é possível graças à arquitetura eficiente do CANbus, que torna a integração entre subsistemas simples, escalável e segura.
Aplicabilidade no Carro Moderno
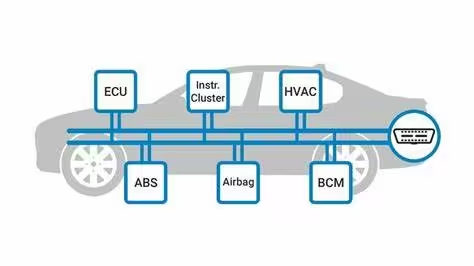
Hoje, praticamente todos os veículos modernos utilizam o protocolo CANbus como sua infraestrutura central de comunicação eletrônica. Ele conecta componentes como:
- Módulo de controle do motor (ECU);
- Sistema de freios ABS e ESC;
- Unidades de controle de airbags;
- Central de conforto (vidros, travas, ar-condicionado);
- Painel de instrumentos;
- Sensores de estacionamento e câmeras de ré.
O CANbus garante que todos esses sistemas operem de forma sincronizada e possam reagir dinamicamente a cada comando do motorista ou evento detectado pelos sensores. Além disso, facilita a realização de diagnósticos via OBD-II, permitindo que oficinas identifiquem rapidamente falhas e otimizem reparos.
CANbus e a Segurança Veicular
O protocolo CANbus é essencial para os sistemas de segurança ativa e passiva dos veículos modernos. Ao possibilitar a troca rápida de informações entre diferentes módulos, ele garante que dispositivos de proteção atuem de forma coordenada, aumentando a eficácia e reduzindo riscos.
Um exemplo prático é o acionamento do airbag. Quando sensores detectam uma desaceleração brusca ou colisão iminente, essa informação é enviada instantaneamente via CAN para o módulo responsável, que dispara os airbags e tensionadores de cintos de segurança.
Outros recursos vitais que dependem do CAN incluem:
- Controle de estabilidade (ESC): monitora a trajetória do carro e aplica frenagens seletivas para manter a estabilidade.
- Freios ABS: ajusta a pressão de frenagem para evitar travamento das rodas.
- Assistentes de frenagem de emergência: detectam obstáculos e intervêm automaticamente, se necessário.
Graças à priorização de mensagens críticas no CANbus, os comandos de segurança têm precedência, garantindo uma atuação rápida e confiável mesmo em situações extremas.
A Importância para a Eficiência e Economia
Além de melhorar a segurança e integração eletrônica, o CANbus contribui diretamente para a eficiência operacional e redução de custos na indústria automotiva.
Antes de sua adoção, a complexidade do cabeamento exigia maior tempo de montagem, mais material, maior peso e dificuldade de manutenção. Com o CAN, é possível:
- Reduzir significativamente o número de cabos, conectores e chicotes elétricos;
- Facilitar diagnósticos eletrônicos com scanners OBD-II, diminuindo o tempo de parada para reparos;
- Diminuir o peso do veículo, contribuindo para a eficiência energética e menor consumo de combustível.
Do ponto de vista da indústria, o CANbus representa um avanço que não só melhora o desempenho dos veículos, como também torna a produção em larga escala mais econômica e padronizada.
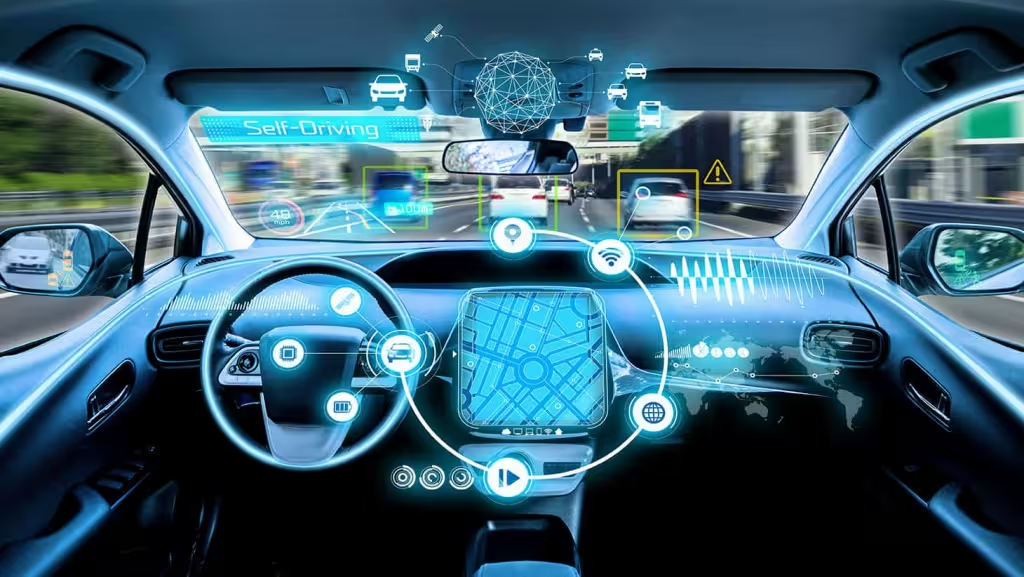
CANbus na Era da Condução Autônoma
A chegada dos veículos autônomos e semiautônomos elevou ainda mais a exigência por comunicação em tempo real e confiável entre os módulos eletrônicos. O CANbus é parte fundamental dessa infraestrutura.
Nos sistemas de ADAS (Advanced Driver Assistance Systems), múltiplos sensores e câmeras geram dados simultaneamente. O CANbus permite que informações críticas, como velocidade, aceleração, frenagem, ângulo de direção e detecção de obstáculos, sejam compartilhadas instantaneamente com os módulos de controle.
Embora outras tecnologias de comunicação, como Ethernet automotiva, estejam sendo incorporadas, o CANbus continua sendo a espinha dorsal da rede veicular, responsável por garantir que os comandos de segurança e operação básica sejam transmitidos com prioridade e baixa latência.
Sem o CAN, seria praticamente inviável desenvolver veículos que exigem alta coordenação entre sistemas eletrônicos autônomos em tempo real.
Variantes e Evolução do Protocolo
Desde sua criação, o protocolo CAN passou por diversas evoluções para atender às crescentes demandas de dados e complexidade nos veículos modernos. A versão mais conhecida hoje é o CAN FD (Flexible Data-rate), introduzido pela Bosch em 2012.
O CAN FD mantém a estrutura básica do protocolo original, mas permite:
- Transmissão de pacotes com até 64 bytes de dados (contra 8 bytes do CAN clássico);
- Taxas de transferência superiores a 1 Mbps, chegando a até 8 Mbps ou mais;
- Melhor desempenho para sistemas com múltiplos sensores e algoritmos avançados.
Essa melhoria foi essencial para acomodar sistemas como visão computacional, radar, LIDAR e inteligência embarcada, componentes-chave para a condução autônoma. Apesar do surgimento de novas tecnologias, como a Ethernet veicular, o CAN FD continua sendo amplamente adotado por sua confiabilidade, robustez e baixo custo.
CANbus em Outros Veículos e Indústrias
Embora o CANbus tenha sido originalmente desenvolvido para a indústria automotiva, sua confiabilidade, simplicidade e eficiência o tornaram popular em diversos outros setores. Ele está presente em:
- Caminhões e ônibus: com múltiplas redes CAN para motor, freios, transmissão e conforto;
- Tratores e máquinas agrícolas: controlando GPS, motor, implementos e telemetria;
- Motocicletas avançadas: especialmente em modelos premium com controle eletrônico de suspensão, freios e aceleração;
- Indústria robótica e automação: para coordenar motores, sensores e controladores lógicos;
- Equipamentos médicos e aeronáuticos: pela segurança na troca de dados entre sistemas embarcados.
Graças à sua padronização internacional (ISO 11898), o CANbus se tornou uma tecnologia versátil que ultrapassa os limites da mobilidade, integrando setores que exigem comunicação em tempo real com alta tolerância a falhas.
Diagnóstico e Engenharia Reversa
Uma das grandes vantagens do uso do CANbus é a capacidade de realizar diagnósticos precisos e não invasivos por meio de interfaces padronizadas, como a porta OBD-II, presente na maioria dos veículos fabricados após 1996.
Com o uso de ferramentas de leitura e análise de rede — como scanners automotivos, adaptadores USB-CAN, ou softwares como SavvyCAN e Wireshark — é possível:
- Identificar e decodificar mensagens CAN;
- Ler parâmetros em tempo real (RPM, velocidade, temperatura, etc.);
- Detectar falhas em sensores, módulos ou cabos;
- Executar comandos ou simular sinais para testes avançados.
Além do uso por oficinas e engenheiros, a engenharia reversa da rede CAN também é popular entre entusiastas e desenvolvedores de projetos de automação, tuning ou retrofit de veículos clássicos com tecnologia moderna.
Padrões e Normas Internacionais
O protocolo CAN é regido por um conjunto de normas internacionais que garantem sua padronização e interoperabilidade entre diferentes fabricantes e sistemas. A principal norma que rege a tecnologia é a ISO 11898, dividida em múltiplas partes que abordam desde a camada física até os protocolos de alto nível.
Entre os principais padrões associados, destacam-se:
- ISO 11898-1: Especifica a camada de protocolo e gerenciamento de mensagens do CAN;
- ISO 11898-2: Define a camada física para alta velocidade (até 1 Mbps);
- ISO 11898-3: Trata da camada física para baixa velocidade e tolerância a falhas;
- SAE J1939: Aplicação do CAN para veículos pesados (caminhões, ônibus);
- CANopen e DeviceNet: Protocolos industriais baseados em CAN para automação e robótica.
A existência dessas normas torna o CANbus uma plataforma confiável, testada e amplamente compatível, permitindo que componentes de diferentes fornecedores operem juntos sem conflitos.
Limitações e Desafios
Apesar de seus inúmeros benefícios, o protocolo CAN não é isento de limitações. Algumas das principais restrições incluem:
- Baixa largura de banda: O CAN clássico opera até 1 Mbps, o que é insuficiente para aplicações que exigem alta taxa de dados, como câmeras HD;
- Segurança cibernética: O protocolo não possui criptografia ou autenticação nativa, o que o torna vulnerável em redes expostas (ex.: via OBD-II);
- Mensagens sem remetente: As mensagens não identificam diretamente a origem, o que pode dificultar rastreamentos em sistemas complexos;
- Latência em redes sobrecarregadas: O mecanismo de arbitragem pode causar atrasos em redes com muitos nós transmitindo simultaneamente.
Esses desafios têm motivado o desenvolvimento de protocolos complementares, como CAN FD e Ethernet automotiva, além da incorporação de camadas de segurança adicionais por parte das montadoras e fornecedores de tecnologia embarcada.
O Futuro da Comunicação Automotiva
Com a crescente complexidade dos veículos modernos — especialmente os elétricos, conectados e autônomos —, a comunicação embarcada também está evoluindo. Embora o CANbus continue sendo uma base sólida, novas tecnologias estão surgindo para complementá-lo.
Entre as tendências de futuro, destacam-se:
- Integração com Ethernet automotiva: Para lidar com dados de alta largura de banda (câmeras, LIDARs);
- Protocolos de segurança embarcada: Como criptografia de mensagens e autenticação de ECUs;
- Gateways inteligentes: Que fazem a ponte entre redes CAN, LIN, Ethernet e redes externas (como 4G/5G);
- Arquitetura centralizada: Substituindo múltiplas ECUs por poderosos controladores centrais que processam dados de todo o veículo.
Apesar dessas inovações, o CANbus continuará sendo um pilar essencial na estrutura eletrônica dos veículos, graças à sua confiabilidade, custo-benefício e ampla adoção. Seu legado seguirá por décadas como a espinha dorsal da eletrônica automotiva.
Conclusão
O protocolo CANbus é, sem dúvida, um dos maiores pilares da evolução tecnológica no setor automotivo. Sua capacidade de reduzir a complexidade da fiação, integrar sistemas eletrônicos diversos e garantir comunicação em tempo real tornou possível o surgimento de veículos mais seguros, inteligentes e eficientes.
Mais do que uma solução técnica, o CAN representa uma infraestrutura estratégica sobre a qual se apoia grande parte das inovações em mobilidade. Desde o controle de estabilidade até a condução autônoma, passando por diagnósticos, conforto e economia, ele está presente em praticamente todas as funções críticas de um veículo moderno.
Mesmo com o avanço de novas tecnologias como CAN FD, Ethernet veicular e inteligência embarcada, o CANbus continuará a desempenhar um papel crucial — não apenas no setor automotivo, mas também em áreas como robótica, transporte pesado e automação industrial.
Em resumo, o CANbus é a coluna vertebral invisível que sustenta a conectividade e a inteligência dos veículos do século XXI — e continuará sendo indispensável na jornada rumo a uma mobilidade mais segura, autônoma e conectada.
FAQs
1. O que significa CANbus e por que é importante?
CANbus é a sigla para Controller Area Network, um protocolo de comunicação usado para conectar sistemas eletrônicos dentro de veículos. Ele é importante porque permite que esses sistemas troquem informações de forma eficiente, segura e em tempo real, reduzindo a quantidade de fios e aumentando a confiabilidade geral do veículo.
2. CANbus é usado apenas em carros?
Não. O protocolo CAN é amplamente utilizado em diversos setores além da indústria automotiva, incluindo caminhões, ônibus, máquinas agrícolas, motocicletas, robótica industrial e até equipamentos médicos. Sua versatilidade e robustez o tornam ideal para aplicações críticas em diversos contextos.
3. Qual a diferença entre CANbus e CAN FD?
O CAN FD (Flexible Data-rate) é uma versão mais avançada do CAN clássico. Ele permite o envio de pacotes maiores (até 64 bytes) e taxas de transferência mais altas, ideal para aplicações que exigem maior volume de dados, como sensores e câmeras em veículos autônomos.
4. CANbus é seguro contra hackers?
Embora o CANbus seja robusto em termos de integridade de dados, ele não possui mecanismos nativos de segurança cibernética, como criptografia ou autenticação. Por isso, redes CAN abertas, como a porta OBD-II, podem ser vulneráveis a ataques. Montadoras estão desenvolvendo soluções complementares para aumentar essa segurança.
5. Como posso diagnosticar problemas na rede CAN do meu veículo?
Você pode usar um scanner automotivo conectado à porta OBD-II para identificar códigos de falha e monitorar dados em tempo real. Ferramentas mais avançadas permitem capturar mensagens CAN, realizar engenharia reversa e testar o funcionamento de diferentes módulos do veículo.